No products in the cart.
View Cart
Subtotal:
€
0,00
Search for:
A propos
L’équipe
Parcours
Nos locations
Actualités
Partenaires
Contact
A propos
L’équipe
Parcours
Nos locations
Actualités
Partenaires
Contact
Trace_Arrierer_plan
Scroll to top
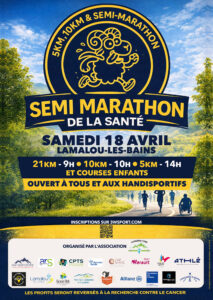
Semi-Marathon de la santé
Samedi 18 avril à Lamalou-les-Bains, à partir de 9h00, voie verte.
Venez nombreux ! Ouvert à tous.